Summery
Seoul National University GNSS Laboratory Satellite (SNUGLITE)-I Project
- Participation
- 2017–2019
- Role
- ADCS Engineer
- 2U CubeSat mission (Launch: Dec 2018)
- Funded by Korea Aerospace Research Institute (KARI) ($205,000 USD)
- Finalist in the 2015 Korea CubeSat Competition
The SNUGLITE-I CubeSat was selected as a finalist in the “2015 CubeSat Competition” organized by the Korea Aerospace Research Institute, with a total funding of 275 million KRW. The main mission was to develop a dual-frequency L1/L2C GPS receiver for CubeSats and use GPS Radio Occultation (RO) to model the ionosphere. Launched in December 2018, SNUGLITE-I is still broadcasting beacons, but due to a failure in the communication module’s receiver, uplink functionality is currently unavailable. For more details, refer to the paper on in-orbit results here.
This project was conducted from 2015 to 2019, and I joined the SNUGLITE team in 2017 as a master’s student. As an Attitude Determination and Control System (ADCS) engineer, I was responsible for the following tasks. These were based on knowledge passed down from previous graduate students, and I implemented the algorithms developed in MATLAB into C and conducted the integration and testing. See related publication.
- Developed ADCS Algorithm
- EKF-based attitde determination system (Sun+Gyro+Mag)
- LQR-based attitude control system (magnetometer only)
- Conducted SILS (Matlab), PILS (Linux-gcc, C), and HILS
- Developed a HILS platform for ADCS [Master’s Thesis]
- Single-axis ADCS HILS Verification
- Design and fabrication of the Helmholtz cage
Index
1. SNUGLITE-I CubeSat 1.1. System Configuration 1.2. Operation Scenario 1.3. Launch 2. Attitude Determination and Control System (ADCS) 2.1. Software-In-the-Loop Simulation (SILS) 2.2. Hardware-In-the-Loop Simulation (HILS) 3. Operation Results 3.1. CubeSat GPS L1/L2C Receiver 3.2. ADCS
1. SNUGLITE-I CubeSat
1.1. System Configuration
Table. System Configuration of the SNUGLITE-I CubeSat DQPSK: differential quadrature phase-shift keying; GMSK: Gaussian minimum shift keying; UHF: ultra-high frequency
| System | Description |
|---|---|
| Mass | 1.9 kg |
| Dimension | 100x100x227 mm (2U) |
| Orbit | 575 km, SSO |
| Uplink | UHF (437.275MHz), AX.25, GMSK 9.6 kbps (telecommand) |
| Downink | UHF (437.275MHz), AX.25, GMSK 9.6 kbps (telemetry) |
| S-Band (2405MHz), DQPSK, 1 Mbps (mission data) | |
| Payloads | SNU L1/L2C GPS Receiver x2 (1st gen) |
| 3-axis fluxgate magnetometer w/ deployable boom | |
| Actuators | PCB-based magnetorquer x3 |
| Reference | NORAD 43784, COSIPAR 2018-099AC, SatNOGS, Gunter’s Space |
1.2. Operation Scenario
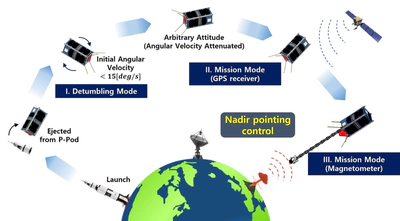
The mission consists of three modes: Detumbling mode, Mission mode (GPS data collection), and Mission mode (Magnetometer boom data collection). Upon ejection from the P-POD, the satellite enters the initial mode, damping angular velocity. Depending on the deployment of the boom, the Mission Mode varies. The ADCS aims to control the satellite’s nadir-pointing to collect data.
1.3. Launch
On December 3, 2018, at 18:32:00+00:00 (UTC), SNUGLITE-I was launched as part of Spaceflight Industries’ SSO-A multi-satellite mission on a Falcon-9 v1.2 (Block 5) rocket.
Video:
2. Attitude Determination and Control System (ADCS)
Related to my Master’s thesis here.
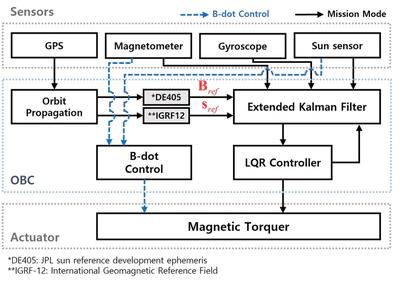
2.1. Software-In-the-Loop Simulation (SILS)
Algorithm design: Developed based on work inherited from previous graduates
- SILS based on MATLAB
- Attitude determination: Extended Kalman filter (combined with coarse sun sensor, magnetometer, and gyroscope)
- Attitude control: LQR controller (magnetorquer only)
Video:
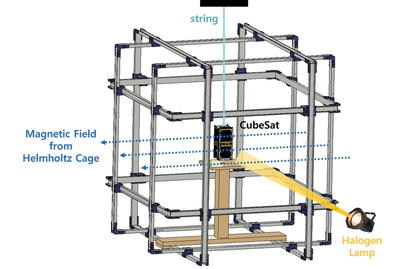
2.2. Hardware-In-the-Loop Simulation (HILS)
Helmholtz cage design and assembly
- 3-axis magnetic cotrol based classical control (PI controller, 50Hz)
- Codevision based on Atemega 128, C language
Video:
Single-axis HILS verification using Helmholtz cage
- ADCS implamentation based on C (linux-gcc, FreeRTOS, Gomspace A3200 OBC). For more details, refer to the paper on HILS verification results here.
Video (50x Fast):
3. Operation Results
3.1. CubeSat GPS L1/L2C Receiver
Due to a failure in the communication module’s uplink, the primary mission of the SNUGLITE-I CubeSat could not be fully verified, resulting in a partial success. However, the GPS receiver development, the core mission of SNUGLITE-I, was successfully completed. The beacon transmits navigation information every 10 seconds, and this data has been used for orbit determination, successfully validating the GPS receiver.
3.2. ADCS
After launch and ejection from P-POD, SNUGLITE-I successfully damped its angular velocity and entered standby mode. The satellite has been performing nadir-pointing control in standby mode. Using attitude data received via the beacon, the ADCS was indirectly evaluated, demonstrating approximately 15° accuracy in attitude determination and control, achieved solely using magnetorquers without reaction wheels.
For more details, refer to the paper on in-orbit results here.