! Under Construction !
Summery

Seoul National University GNSS Laboratory Satellite (SNUGLITE)-III Project
- Participation
- 2022–2025
- Role
- Project Manager, Navigation Engineer
- 6U(3U+3U) CubeSat mission (Launch: Nov 2025)
- Funded by Korea Aerospace Research Institute (KARI) ($600,000 USD)
- Finalist in the 2022 Korea CubeSat Competition
The SNUGLITE-III CubeSat was selected as a finalist in the “2022 CubeSat Competition” organized by the Korea Aerospace Research Institute, receiving a total funding of 750 million KRW (~$600,000 USD). This mission involves two 3U CubeSats designed to perform autonomous rendezvous and docking without thrusters while conducting GPS radio occultation (RO) measurements, which will be used for 3D atmospheric observations of the Earth. As the successor to the SNUGLITE-I and SNUGLITE-II missions, SNUGLITE-III is the final CubeSat project developed by Seoul National University’s GNSS Laboratory. The mission focuses on advancing autonomous rendezvous and formation flying technologies, particularly developing a world-first thrusterless orbit control system and a GPS-only real-time kinematic (RTK) relative navigation system. SNUGLITE-III is scheduled for launch aboard Nuri (KSLV-II) during its 4th mission in November 2025 from the Naro Space Center.
This project is set to run from 2022 to 2026. The development team includes members from the SNUGLITE-II project, with me serving as a postdoctoral researcher, leveraging all the experiences gained during the SNUGLITE-II development. As part of this project, I provide guidance to the Ph.D. students while contributing to the development of the attitude control system, flight software, GPS relative navigation system, orbit control system, and assembly, integration, and test (AIT) processes. I was responsible for the following tasks.
-
GPS Relative Nagigation System (RN) [Doctorial Dissertation]
- World’s first real-time kinematic (RTK) relative navigation system
- Conducted SILS (Matlab), PILS (Linux-gcc, C), and HILS
-
Developed Attitute Control System (ACS) Algorithm
- Based on SNUGLITE-II ACS
- Conducted SILS (Matlab), PILS (Linux-gcc, C), and HILS
-
Developed Flight Software
- Developed software based on a real-time OS (FreeRTOS, Gomspace A3200 OBC)
- Round-robin-based scheduling (ADCS) program
- Priority-based scheduling (CDH) program
-
Assembly, Integration, and Test (AIT)
- Hardware design (Solar panel, Interface board, Test bed)
- Performed all stages of satellite assembly
- Led the integration of subsystems and completed software integration (including sensor calibration)
- Conducted far-field tests, vibration tests for launch, and space environment testing
Index
1. SNUGLITE-III CubeSat 1.1. SNUGLITE Team (2022) 1.2. System Configuration 1.3. Operation Scenario 2. GPS Relative Navigation System (RN) 3. Attitude Control System (ACS) 4. Assembly, Integration, and Test (AIT) 5. Operation Results 5.1. Launch and Initial Operation
1. SNUGLITE-III CubeSat
1.1. SNUGLITE Team (2022)
Table. SNUGLITE Team Member and Role
1 RN: GPS Relative Navigation System, 2 FSW: Flight Software, 3 ACS: Attitude Control System, 4 AIT: Assembly, Integration, and Test, 5 OCS: Orbit Control System, 6 PM: Project Manager, 7 SYS: Satellite System, 8 ADS: Attitude Determination System, 9 EPS: Electrical Power System, 10 COM: Comuunication Sytstem, 11 GND: Ground Station, 12 STR: Structure System, 13 THR: Thermal System, 14 PAY1: Payload1 (Docking Device), 15 PAY2: Payload2 (Inter-Satellite Link), 16 EOP: End of Project
| Name | Role | Participation Period |
|---|---|---|
| Changdon Kee | Supervisor | - |
| Hanjoon Shim | Technical Adviser (Former team leader, SNUGLITE-II) | ~‘25.9 |
| 1RN, 2FSW, 3ACS, 4AIT, 5OCS, 15PAY2 | ||
| Yonghwan Bae | Team Leader | ~EOP |
| 6PM, 2FSW, 4AIT, 8ADS, 10COM, 11GND | ||
| Hojoon Jeong | 5AIT, 9STR, 14PAY1 | ~EOP |
| Jaeuk Park | 9EPS, 10COM, 11GND | ~EOP |
| Jae Woong Hwang | 5OCS, 11PAY1 | ~Now |
| Seongjin Park | 11PAY2 | ~EOP |
| Jikang Lee | 10THR | ~‘24.3 |
1.2. System Configuration
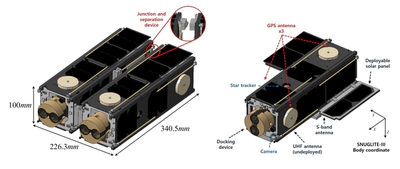
Fig. SNUGLITE-III CubeSat: Before and after seperation
The SNUGLITE-III CubeSat consists of two 3U CubeSats that automatically seperate during the mission. The overall system configuration and the components used are listed in the table below.
Table. System Configuration of the SNUGLITE-III CubeSat DQPSK: differential quadrature phase-shift keying; GMSK: Gaussian minimum shift keying; UHF: ultra-high frequency
| System | Description |
|---|---|
| Mass | A: 3.1 kg |
| B: 3.1 kg | |
| Dimension | 100x100x340 mm (6U, Joint) |
| 100x414x340 mm (3U, Seperated) | |
| Orbit | 600 km, SSO |
| Uplink | UHF, AX.25, GMSK 9.6 kbps (telecommand) |
| Downink | UHF, AX.25, GMSK 9.6 kbps (telemetry) |
| S-Band (2405 MHz), DQPSK, 1 Mbps (mission data) | |
| Payloads | SNU L1/L2C GPS Receiver x3 (3rd gen) |
| Electro Magnetic Docking Device | |
| Inter-Satellite-Link (LoRa SX1262) | |
| Actuators | Reaction wheel x3, Magnetorquer x3 |
| Reference | - |
1.3. Operation Scenario
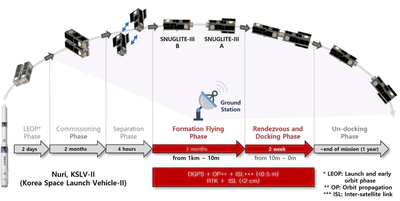
Fig. Operation Scenario
2. GPS Relative Nagigation (RN) System
The GPS relative navigation (RN) system was developed based on the experience from the KARDSAT. In the KARDSAT project, a sub-meter level differential GPS (DGPS)-based relative navigation system was developed, while in the SNUGLITE-III CubeSat project, a centimeter-level high-precision real-time kinematic (RTK) relative navigation system was implemented. This system marked the first-ever application of an RTK system in low Earth orbit, with an extremely efficient algorithm designed specifically for on-board use. For more details, refer to my [Doctorial Dissertation] and the published representative paper here.
The concept of the GPS RN system is shown in the figure below. Orbit propagation serves as a backup in case of inter-satellite link failures.
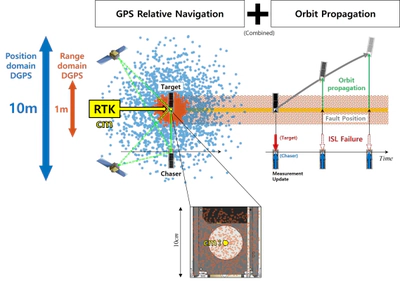
Fig. Concept of GPS Relative Navigation System
- Carrier-phase-based relative navigation system (cm-level accuracy)
- Highly efficient RTK algorithm using the LAMBDA technique (reduced computation load for CubeSat platform)
- Handles intermittent communication and failures in the inter-satellite link using an orbital propagation module
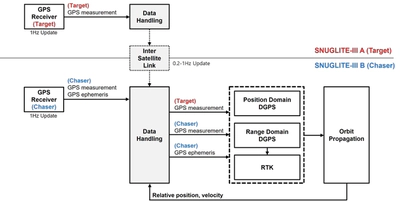
Fig. Overall Block Diagram of RN
3. Attitude Control System (ACS)
The attitude control system was developed based on the experience from SNUGLITE-II. In SNUGLITE-III, an attitude control is utilized for orbital control.
4. Assembly, Integration, and Test (AIT)
will be updated.
5. Operation Results
5.1. Launch and Initial Operation
- On Dec 21, 2022, at approximately 16:00 (UTC+9), the SNUGLITE-II CubeSat was launched from the Naro Space Center in Goheung, South Korea, aboard the KSLV-II (Nuri) launch vehicle along with a performance verification satellite. At approximately 12 mins after, the CubeSat was ejected from the POD of the KSLV-II and successfully reached a sun-synchronous orbit at an altitude of 600 km.
https://youtu.be/kj-oIE3ABNk?si=jPNPDTD33C1cqYpm
Video: KSLV-II Nuri Launch at Naro-Space Center in Korea
Video: SNUGLITE-III CubeSat Ejection from KSLV-II POD